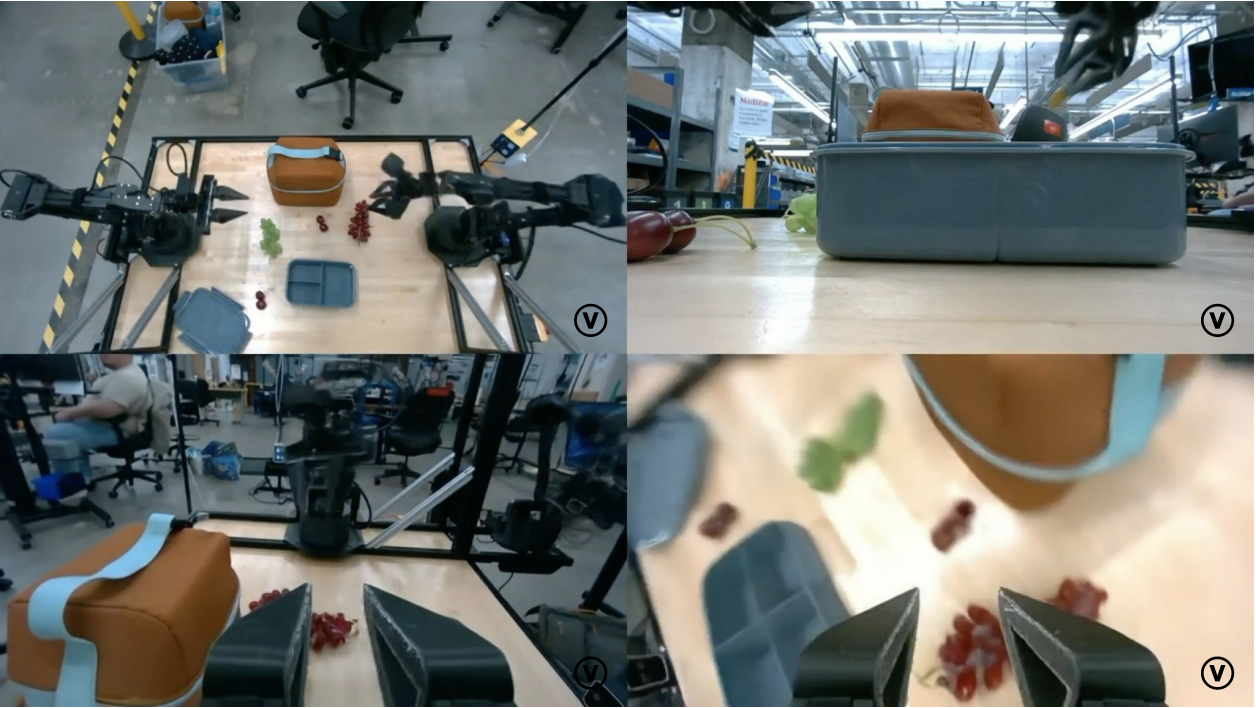
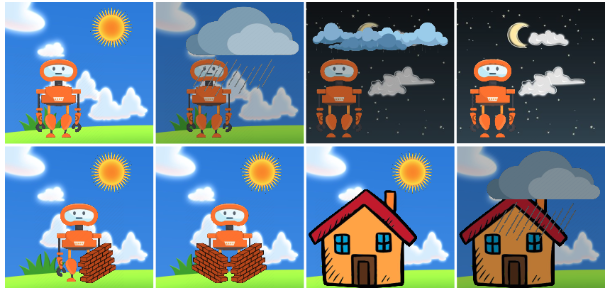
Evaluating Gemini Robotics Policies in a Veo World Simulator
Gemini Robotics Team, Google DeepMind
Preprint 2025
website / arxiv
Member of Technical Staff at Generalist AI. Previously: Staff Research Scientist at Google DeepMind Robotics. Training generally intelligent robots. PhD from UC Berkeley, advised by Professors Sergey Levine, Pieter Abbeel and Trevor Darrell, and supported by the NSF Graduate Research Fellowship.

CORL 2025. Google DeepMind Sponsor Booth Live demo of Gemini Robotics 1.5 on Aloha robot
ICLR 2025. Robot Learning Workshop. Gemini Robotics: Bringing AI into the Physical World
RSS 2024. Workshop on Semantic Reasoning and Goal Understanding in Robotics (SemRob). Free lunch? Revisiting tradeoffs in goal-conditioned policy learning in the foundation model era
IROS 2023. Workshop on Learning Meets Model-based Methods for Manipulation and Grasping. RoboCat: A self-improving robotic agent
5th Inter-experiment Machine Learning Workshop and EP-IT Data science seminar. Beyond Pick and Place - Tackling Robotic Stacking of Diverse Shapes
Research and Applied AI Summit 2019: Modularity for Robot Learning
Evaluating Gemini Robotics Policies in a Veo World Simulator
Gemini Robotics Team, Google DeepMind
Preprint 2025
website / arxiv
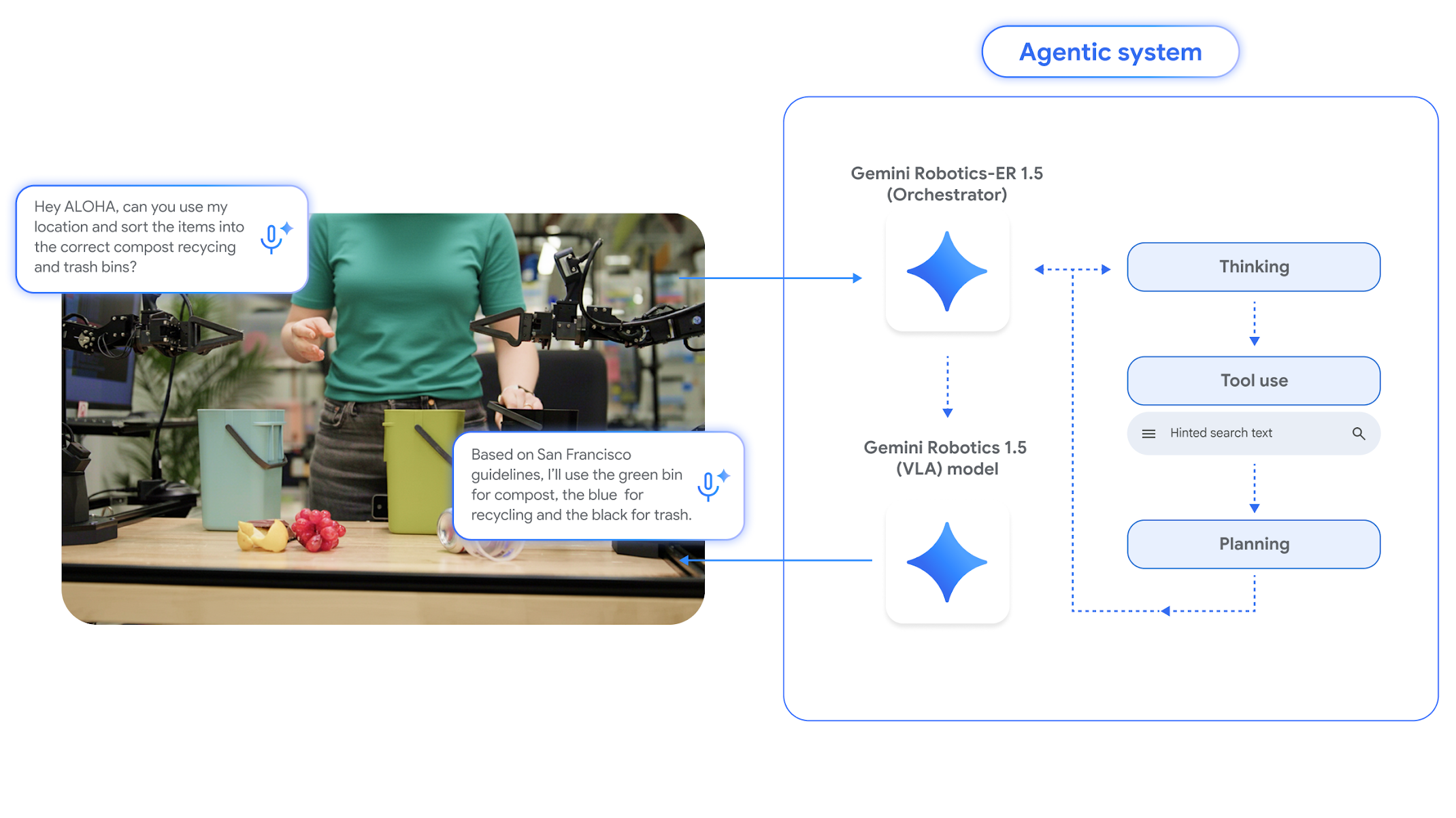
Gemini Robotics 1.5: Pushing the Frontier of Generalist Robots with Advanced Embodied Reasoning, Thinking, and Motion Transfer
Gemini Robotics Team
Preprint 2025
website / arxiv / blog
Gemini Robotics: Bringing AI into the Physical World
Gemini Robotics Team
Preprint 2025
website / arxiv / blog
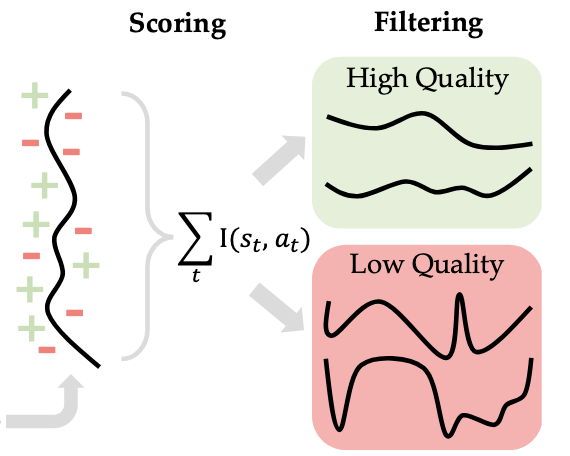
Robot Data Curation with Mutual Information Estimators
Joey Hejna, Suvir Mirchandani, Ashwin Balakrishna, Annie Xie, Ayzaan Wahid, Jonathan Tompson, Pannag Sanketi, Dhruv Shah, Coline Devin, Dorsa Sadigh
RSS 2025
arxiv
Open x-embodiment: Robotic learning datasets and rt-x models
Open X-Embodiment Collaboration [>170 Authors]
Best Paper Award! ICRA 2024
website
Robocat: A self-improving generalist agent for robotic manipulation
Konstantinos Bousmalis*, Giulia Vezzani*, Dushyant Rao*, Coline Devin*, Alex X. Lee*, Maria Bauza*, Todor Davchev*, Yuxiang Zhou*, Agrim Gupta*, Akhil Raju, Antoine Laurens, Claudio Fantacci, Valentin Dalibard, Martina Zambelli, Murilo Martins, Rugile Pevceviciute, Michiel Blokzijl, Misha Denil, Nathan Batchelor, Thomas Lampe, Emilio Parisotto, Konrad Zolna, Scott Reed, Sergio Gomez Colmenarejo, Jon Scholz, Abbas Abdolmaleki, Oliver Groth, Jean-Baptiste Regli, Oleg Sushkov, Tom Rothorl, Jose Enrique Chen, Yusuf Aytar, Dave Barker, Joy Ortiz, Martin Riedmiller, Jost Tobias Springenberg, Raia Hadsell, Francesco Nori and Nicolas Heess.
TMLR 2023
arxiv
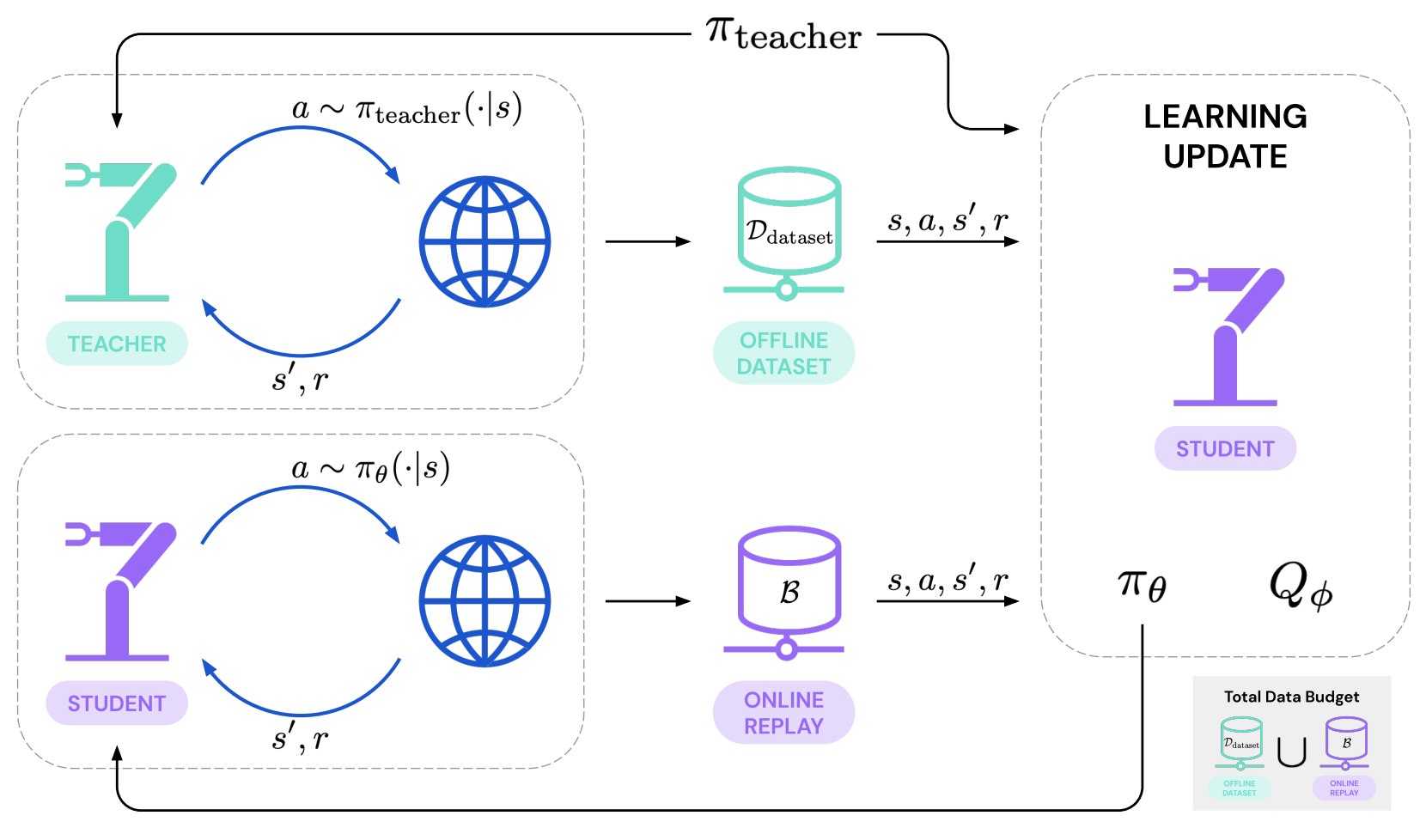
How to Spend Your Robot Time: Bridging Kickstarting and Offline Reinforcement Learning for Vision-based Robotic Manipulation
Alex X Lee*, Coline Devin*, Jost Tobias Springenberg*, Yuxiang Zhou, Thomas Lampe, Abbas Abdolmaleki, Konstantinos Bousmalis
IROS 2022
arxiv
Beyond pick-and-place: Tackling robotic stacking of diverse shapes
Alex X Lee*, Coline Devin*, Yuxiang Zhou*, Thomas Lampe*, Konstantinos Bousmalis*, Jost Tobias Springenberg*, Arunkumar Byravan, Abbas Abdolmaleki, Nimrod Gileadi, David Khosid, Claudio Fantacci, Jose Enrique Chen, Akhil Raju, Rae Jeong, Michael Neunert, Antoine Laurens, Stefano Saliceti, Federico Casarini, Martin Riedmiller, Francesco Nori
CoRL 2021
arxiv /
blog /
video

Fully Autonomous Real-World Reinforcement Learning with Applications to Mobile Manipulation
Charles Sun, Jȩdrzej Orbik, Coline Manon Devin, Brian H Yang, Abhishek Gupta, Glen Berseth, Sergey Levine
CoRL 2021
arxiv
SMiRL: Surprise Minimizing RL in Dynamic Environments
Glen Berseth, Daniel Geng, Coline Devin, Chelsea Finn, Dinesh Jayaraman, Sergey Levine
ICLR 2021 (Oral)
arxiv /
blog
Learning To Reach Goals Without Reinforcement Learning
Dibya Ghosh, Abhishek Gupta, Justin Fu, Ashwin Reddy, Coline Devin, Benjamin Eysenbach, Sergey Levine
arxiv
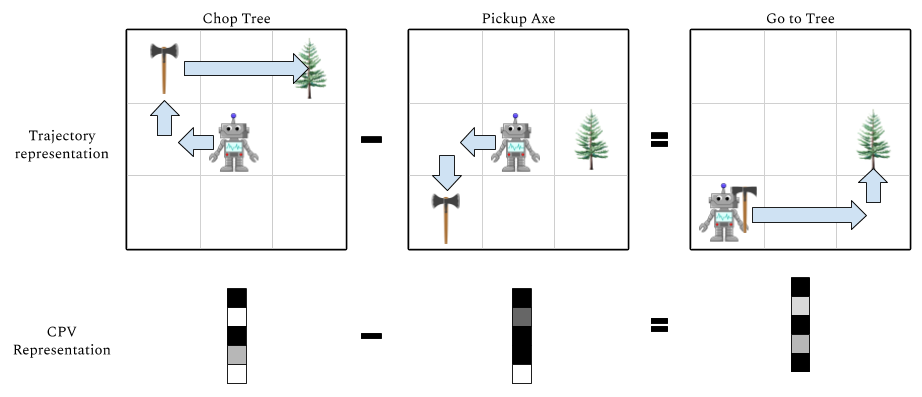
Plan Arithmetic: Compositional Plan Vectors for Multi-Task Control
Coline Devin, Daniel Geng, Pieter Abbeel, Trevor Darrell, Sergey Levine
NeurIPS 2019
arxiv /
webpage /
short video /
code
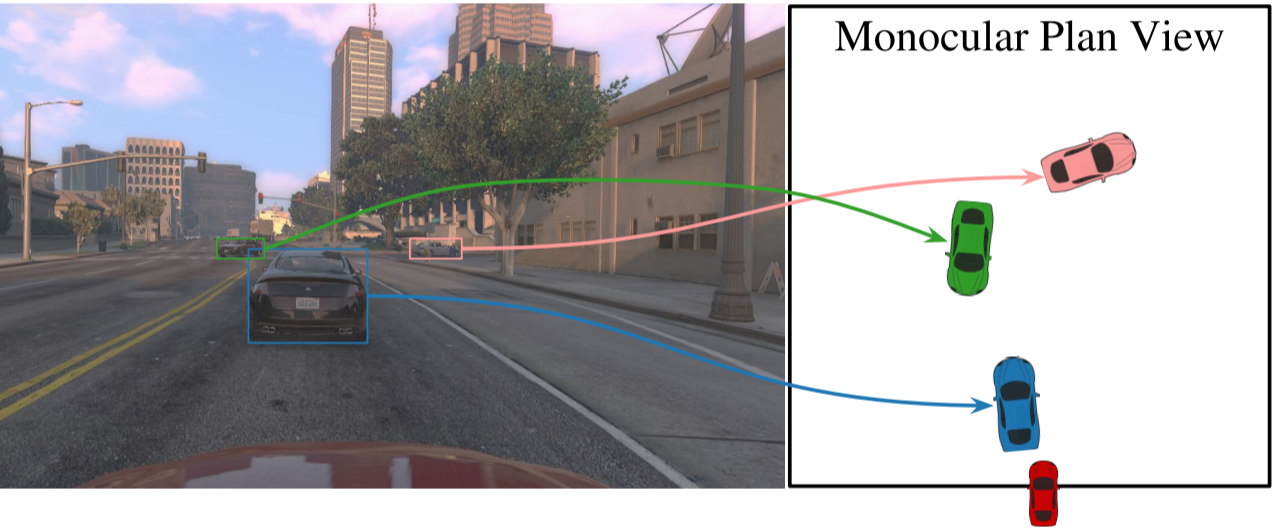
Monocular Plan View Networks for Autonomous Driving
Dequan Wang, Coline Devin, Qi-Zhi Cai, Philipp Krahënbühl, Trevor Darrell
IROS 2019
arxiv
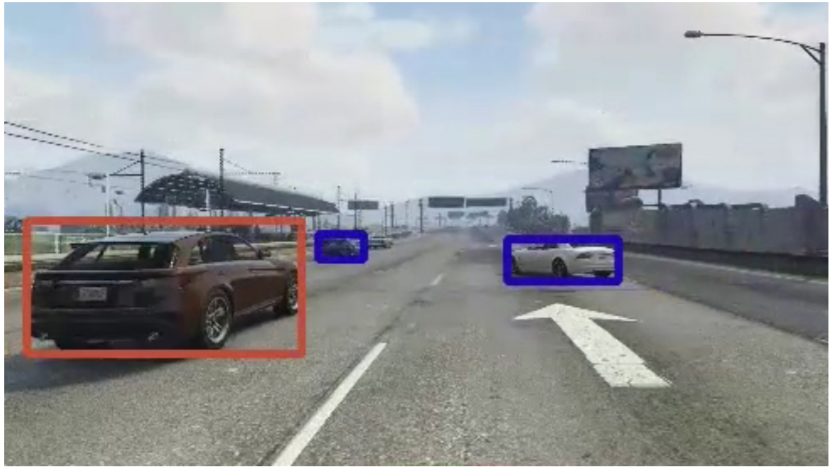
Deep Object Centric Policies for Autonomous Driving
Dequan Wang, Coline Devin, Qi-Zhi Cai, Fisher Yu, Trevor Darrell
ICRA 2019
arxiv
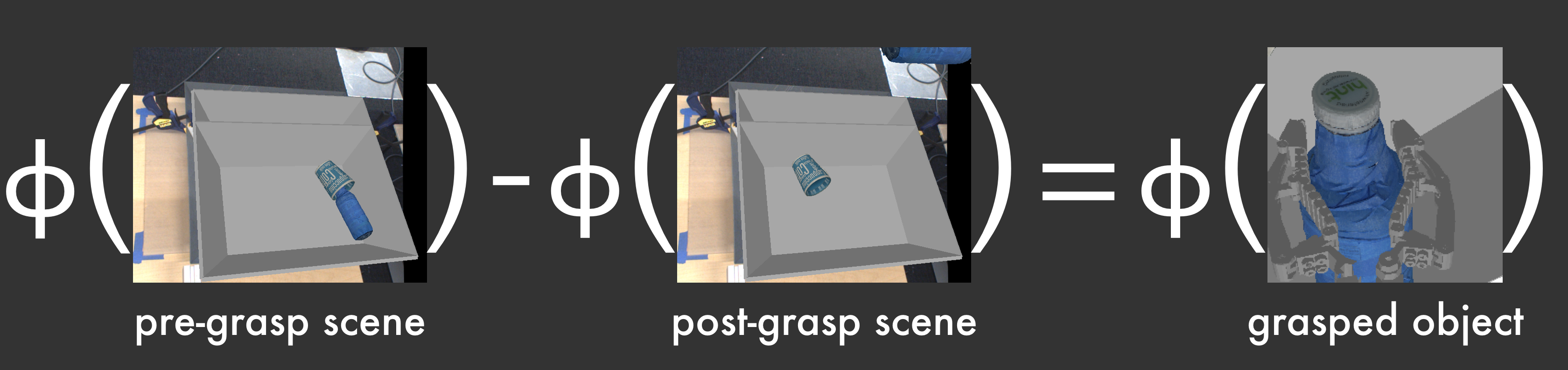
Grasp2Vec: Learning Object Representations from Self-Supervised Grasping
Eric Jang*, Coline Devin*, Vincent Vanhoucke, Sergey Levine
* Denotes equal contribution
CoRL 2018
arxiv /
webpage /
code
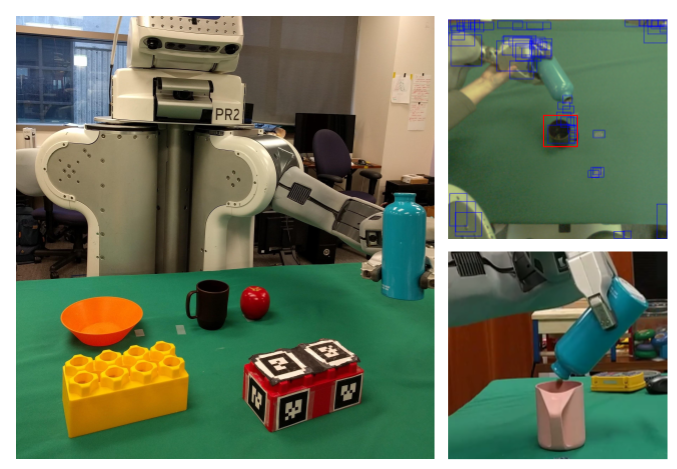
Deep Object-Centric Representations for Generalizable Robot Learning
Coline Devin, Pieter Abbeel, Trevor Darrell, Sergey Levine
ICRA 2018
arxiv /
webpage /
code
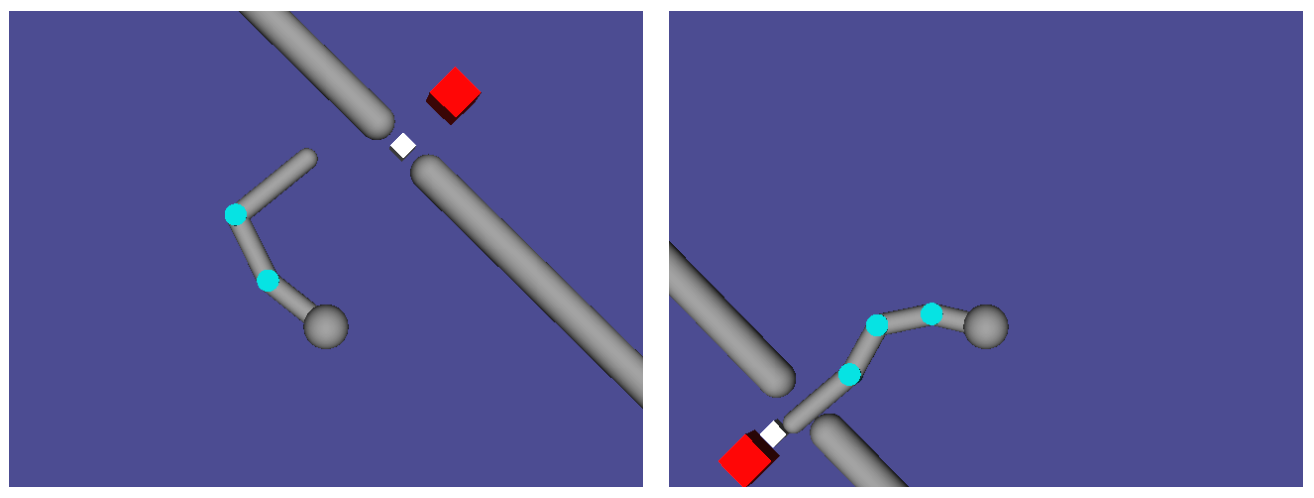
Learning Invariant Feature Spaces to Transfer Skills with Reinforcement Learning
Abhishek Gupta*, Coline Devin*, YuXuan Liu, Pieter Abbeel, Sergey Levine
* Denotes equal contribution
ICLR, 2017
webpage /
video
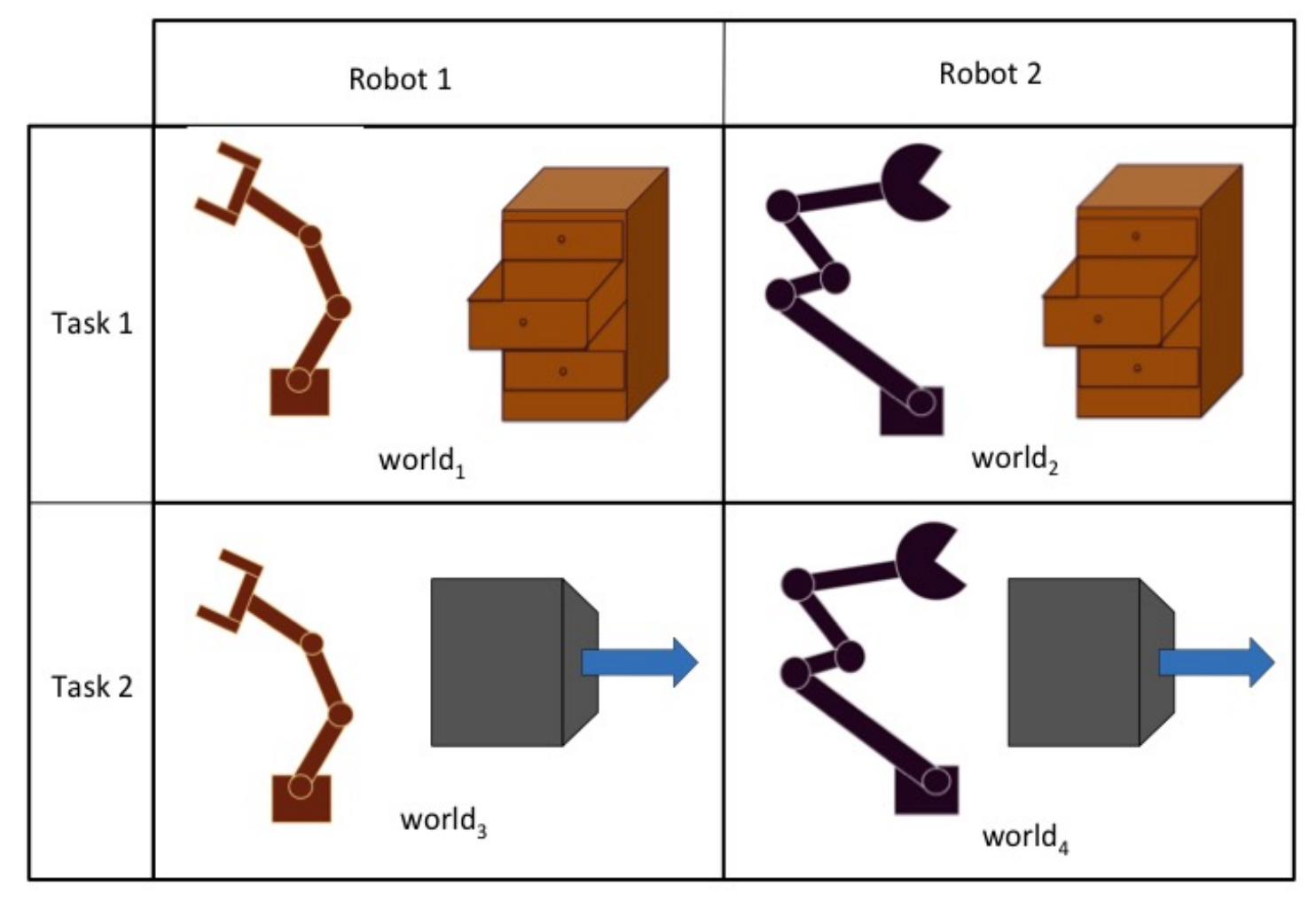
Learning Modular Neural Network Policies for Multi-Task and Multi-Robot Transfer
Coline Devin*, Abhishek Gupta*, Trevor Darrell, Pieter Abbeel, Sergey Levine
* Denotes equal contribution
ICRA, 2017
arxiv /
webpage /
video
Adapting deep visuomotor representations with weak pairwise constraints
Eric Tzeng*, Coline Devin*, Judy Hoffman, Chelsea Finn, Pieter Abbeel, Sergey Levine, Kate Saenko, Trevor Darrell
WAFR, 2016
arxiv